Visual Odometry on Mars
Published:
Creating a visual localization system for robot localization on Mars.
Description:
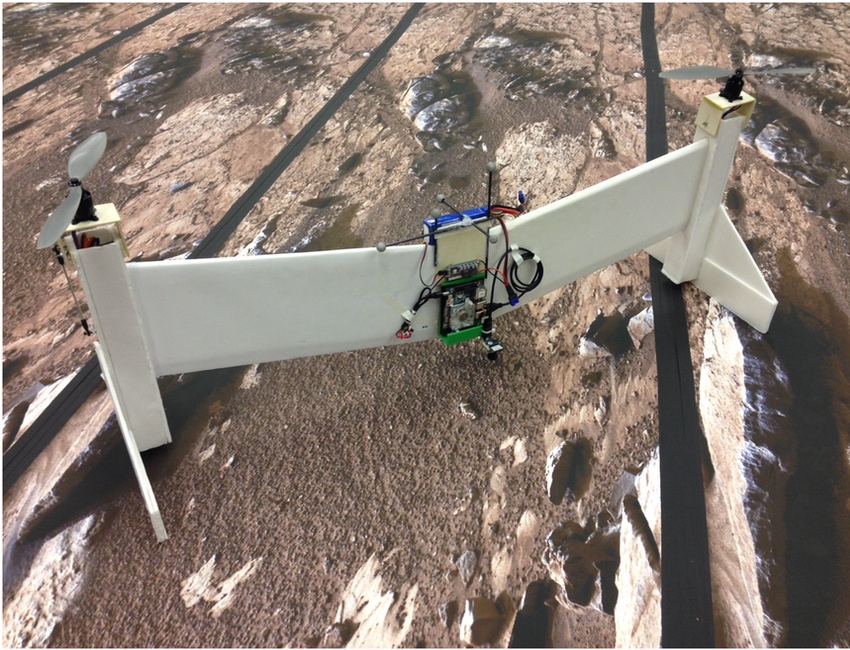
Autonomy is essential for flying on Mars because it’s impossible to remotely operate a flying vehicle due to the communications delay between planets. At a high level, the vehicle must calculate its change in pose over time at a high framerate (“odometry”). Over the summer I integrated a state-of-the-art visual odometry technique into NASA’s Mars exploration UAV prototype. This technique, Semi-Direct Visual Odometry by Forster et al, allows for the vehicle to be localized with centimeter accuracy using only information from a camera facing the surface of the planet. Solving the localization problem paves the way for autonomous navigation and exploration. In the video above, I briefly overview the technologies I integrated to achieve camera-only localization in a simulated Mars environment. In this video, I explain the project in detail during a technical talk at NASA. This PDF presentation contains the latest version of the slides.
Teaser Image: